Abstract
Current wide-angle aerial and robotic vision systems are constrained by limited transmission bandwidth, onboard computational capacity, and real-time processing requirements. Existing video compression methods are not optimised for large fields of view or for the way humans actually perceive visual information, resulting in unnecessary transmission of visually redundant data.
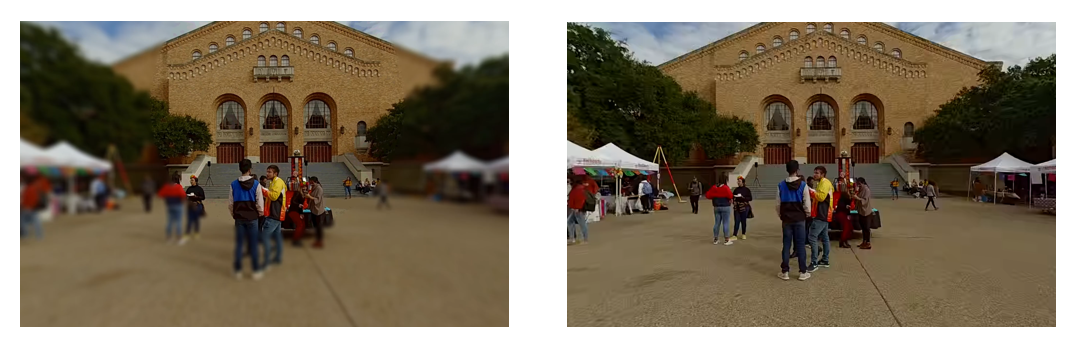
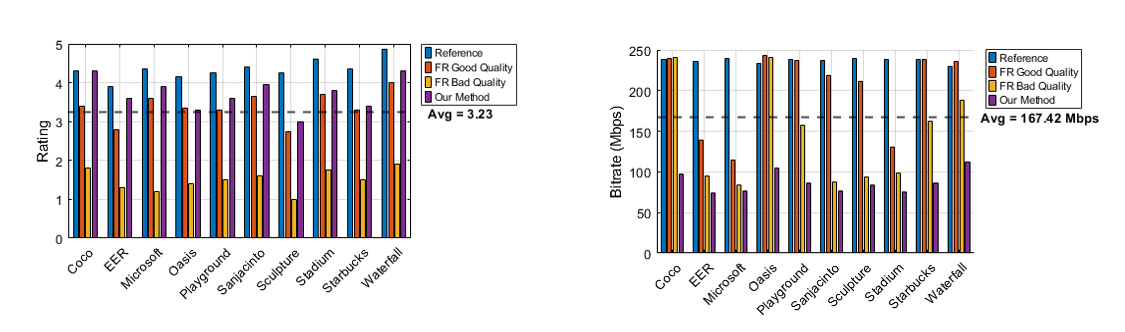
This research investigates a new generation of perception-driven video processing technologies inspired by the human visual system. Our recent work demonstrates that integrating psychovisual perception models into video compression pipelines can reduce transmitted data by up to 80% while maintaining perceived visual quality. The system prioritises information that is visible to humans, enabling more efficient video transmission in constrained communication environments.
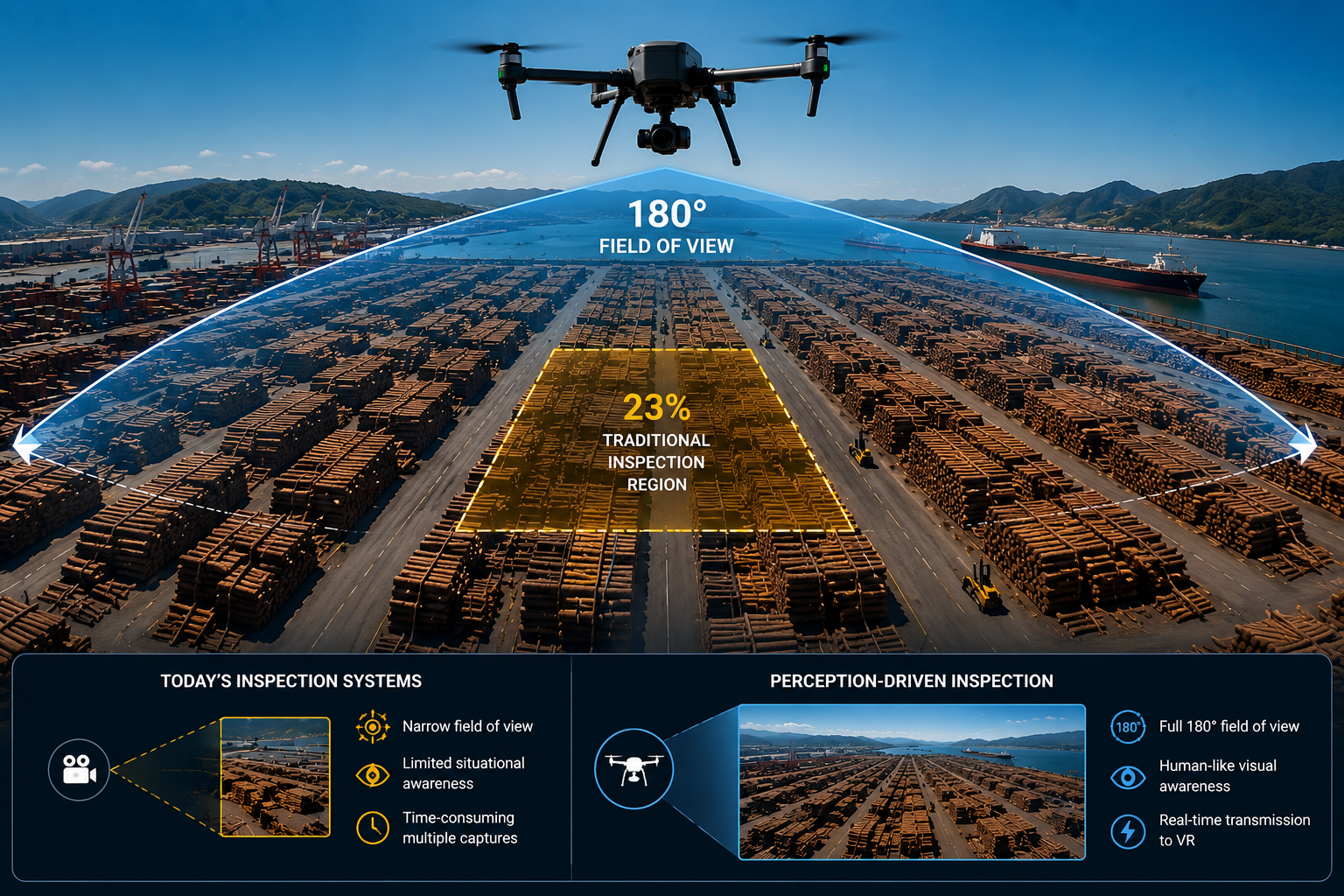
The project aims to develop real-time 180-degree immersive vision technologies for drones and autonomous systems. Current drone operators typically use only a small fraction of the available visual field, which reduces situational awareness, navigation precision, and operational safety in complex environments. The proposed approach supports low-latency wide-angle visualisation in headset-based piloting systems while also contributing to more efficient artificial intelligence and machine vision workflows.
Applications include beyond visual line-of-sight drone operations, environmental monitoring, ecosystem restoration, emergency response, search and rescue, remote inspection, and industrial monitoring. The project also contributes toward future embedded AI systems capable of perception-aware video understanding under real-world bandwidth and edge-computing constraints.